Smart Ankle
(project ref. number: PR19-PAI-P1)
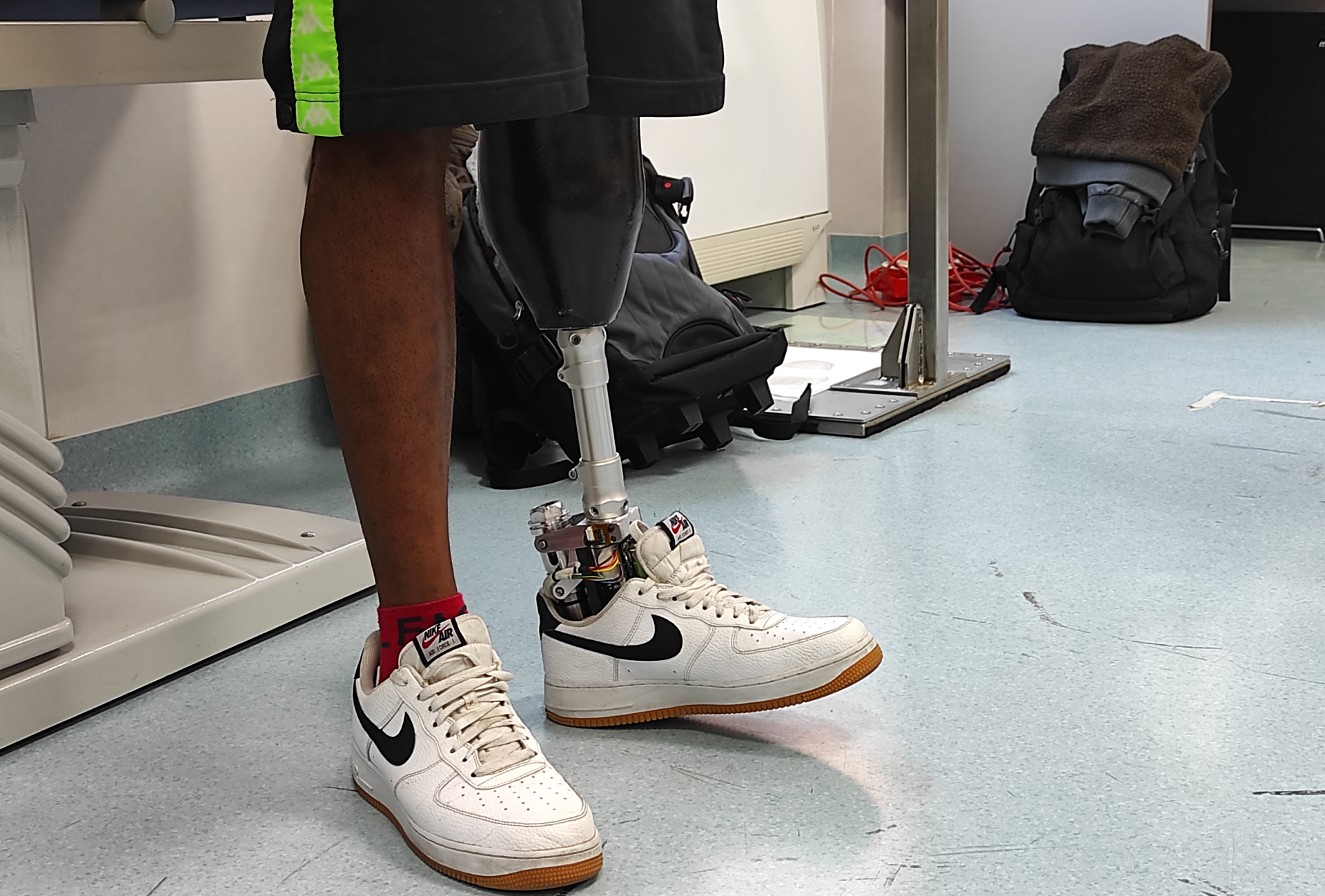
Robotic ankle prosthesis able to give a more natural and safe walk to the patient. It is the evolution of passive carbon fiber foot and is highly innovative thanks to a motorized mechanism that allows a more physiological movement. Thanks to the integrated sensors, this prosthesis can understand which phase of the movement the patient is in, cushioning the step during contact with the ground.
Smart Ankle Gallery
Features and certifications
- Ergonomic robotic prosthesis
- Configurable via bluetooth
- Reduces the risk of stumbling
- High energy return thanks to the high profile in carbon fiber
- High ROM also suitable for inclined surfaces
- Built-in battery and rechargeable via USB-C
Publications and patents
2024
Bodo G., Tessari F., Buccelli S., Laffranchi M.
A Rapid Control Prototyping and Hardware-in-the Loop Approach for Upper Limb Robotic Exoskeletons Control
Applied Sciences (Switzerland), vol. 14, (no. 5)
2023
Marinelli A., Boccardo N., Tessari F., Di Domenico D., Caserta G., Canepa M., Gini G., Barresi G., Laffranchi M., De Michieli L., Semprini M.
Active upper limb prostheses: a review on current state and upcoming breakthroughs
Progress in Biomedical Engineering, vol. 5, (no. 1)
2023
Mariani G., Tessari F., Ferraresi C., Lucania E., Tauro R.L., Freddolini M., Traverso S., Cherubini A., Gruppioni E., Laffranchi M., De Michieli L., Barresi G.
An Augmented Cooperative Setting for Training the Embodiment of an Artificial Lower Limb
Conference Proceedings - IEEE International Conference on Systems, Man and Cybernetics, pp. 1549-1554
Conference Paper
Conference
2023
Mariani G., Tessari F., Ferraresi C., Lucania E., Tauro R.L., Freddolini M., Traverso S., Cherubini A., Gruppioni E., Laffranchi M., De Michieli L., Barresi G.
Competitive Training in Spatial Augmented Reality for Prosthetic Leg Embodiment
2023 IEEE 11th International Conference on Serious Games and Applications for Health, SeGAH 2023
Conference Paper
Conference
2023
Bodo G., Tessari F., Buccelli S., De Guglielmo L., Capitta G., Laffranchi M., De Michieli L.
Customized Series Elastic Actuator for a Safe and Compliant Human-Robot Interaction: Design and Characterization
IEEE International Conference on Rehabilitation Robotics
Conference Paper
Conference
2023
Bucchieri A., Tessari F., Buccelli S., Barresi G., De Momi E., Laffranchi M., De Michieli L.
Human-Centered Functional Task Design for Robotic Upper-Limb Rehabilitation
IEEE International Conference on Rehabilitation Robotics
Conference Paper
Conference
2023
Tessari F., Galluzzi R., Tonoli A., Amati N., De Michieli L., Laffranchi M.
Knee prosthesis powered by a fully integrated and highly back-drivable electro-hydrostatic actuator
Mechatronics, vol. 91
Article
Journal
2023
Bruni G., Marinelli A., Bucchieri A., Boccardo N., Caserta G., Di Domenico D., Barresi G., Florio A., Canepa M., Tessari F., Laffranchi M., De Michieli L.
Object stiffness recognition and vibratory feedback without ad-hoc sensing on the Hannes prosthesis: A machine learning approach
Frontiers in Neuroscience, vol. 17
2023
Puliti M., Driessen J., Vitale N., Tessari F., Traverso S., Laffranchi M., De Michieli L., Shtrepi L.
Use of Metamaterials to Reduce Acoustic Noise Emissions from Lower Limb Prostheses: An Experimental Validation
IEEE International Conference on Rehabilitation Robotics
Conference Paper
Conference
2022
Buccelli S., Tessari F., Fanin F., De Guglielmo L., Capitta G., Piezzo C., Bruschi A., Van Son F., Scarpetta S., Succi A., Rossi P., Maludrottu S., Barresi G., Creatini I., Taglione E., Laffranchi M., De Michieli L.
A Gravity‐Compensated Upper‐Limb Exoskeleton for Functional Rehabilitation of the Shoulder Complex
Applied Sciences (Switzerland), vol. 12, (no. 7)
2022
Puliti M., Tessari F., Galluzzi R., Traverso S., Tonoli A., De Michieli L., Laffranchi M.
A Hybrid Swing-Assistive Electro-Hydrostatic Bionic Knee Design
Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, vol. 2022-August
2022
Bruni G., Bucchieri A., Tessari F., Boccardo N., Marinelli A., De Momi E., Laffranchi M., De Michieli L.
A Multi-Body Model of an upper-limb prosthesis for grip force estimation and related object interaction application
Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, vol. 2022-August
2022
Guercini L., Tessari F., Driessen J., Buccelli S., Pace A., De Giuseppe S., Traverso S., De Michieli L., Laffranchi M.
An Over-Actuated Bionic Knee Prosthesis: Modeling, Design and Preliminary Experimental Characterization
Proceedings - IEEE International Conference on Robotics and Automation, pp. 5467-5473
Conference Paper
Conference
2022
Bodo G., Bello P.D., Tessari F., Buccelli S., Boccardo N., De Michieli L., Laffranchi M.
Comparative analysis of inverse kinematics methodologies to improve the controllability of rehabilitative robotic devices
IEEE International Conference on Rehabilitation Robotics, vol. 2022-July
Conference Paper
Conference
2022
Bodo G., Di Bello P., Tessari F., Buccelli S., Boccardo N., De Michieli L., Laffranchi M.
Comparative Analysis of Inverse Kinematics Methodologies to Improve the Controllability of Rehabilitative Robotic Devices
IEEE-RAS-EMBS International Conference on Rehabilitation Robotics (ICORR)
Article in Press
Conference
15 / 23
Informations and details
For all the informations and details about Smart Ankle, click the button and send us an email:
Team Leader: Simone Traverso