Float
(project ref. number: PR19-RR-P2)
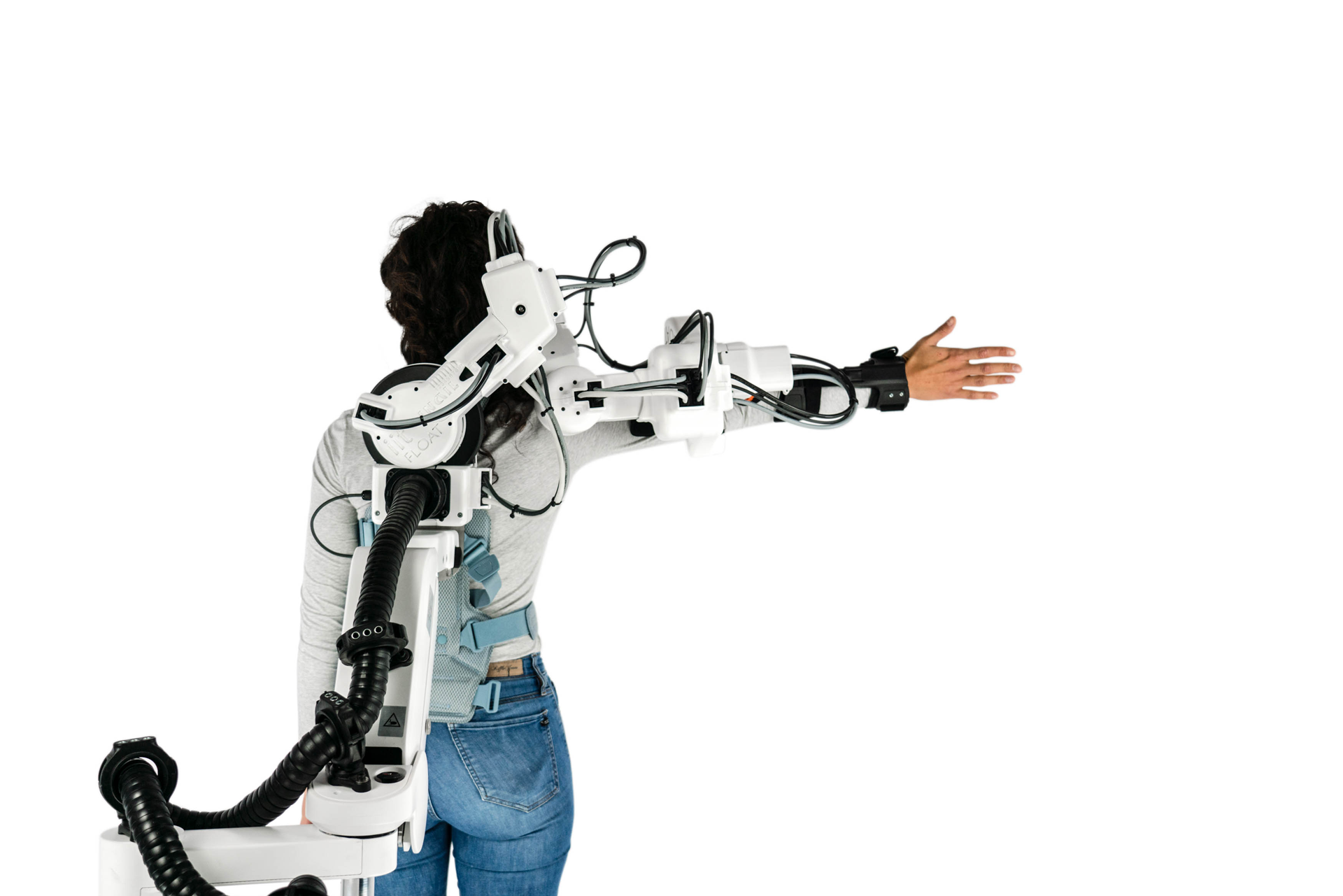
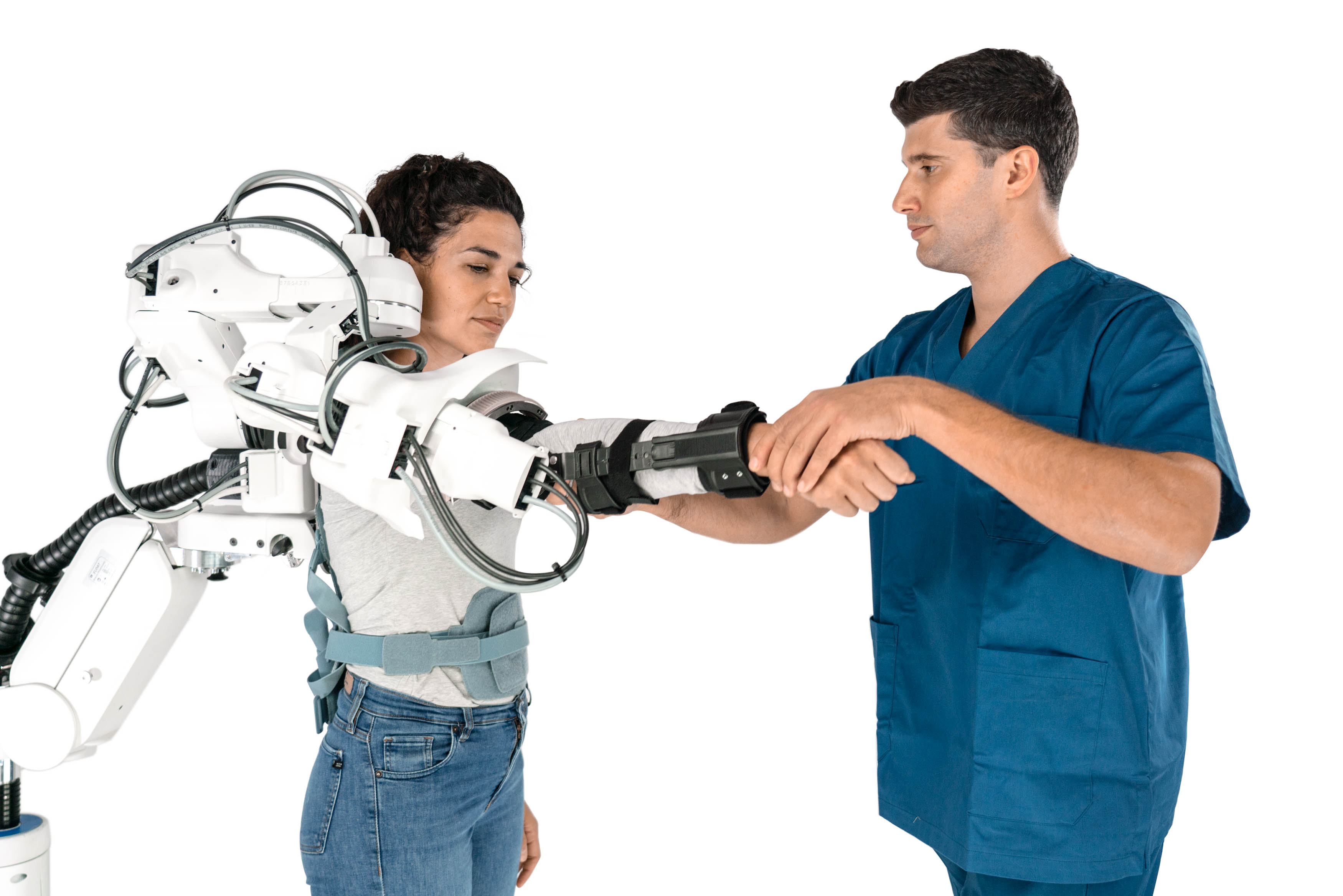
A robotic device for the upper limb and in particular for the shoulder, which allows to improve the effectiveness and efficiency of the rehabilitation process of this part of the body. A system close to the needs of therapists, capable of performing complex exercises and returning analytical data on their execution for each patient.





Features and certifications
- Rehabilitation exercises for orthopedic patients
- Wide freedom of movement
- Possibility of rehabilitation while sitting, standing and bent over
- Weight of the exoskeleton not felt by the patient (through vertical weight compensation)
- Anthropometry measures covered (5th percentile woman - 95th percentile man)
- 5 active joints for the mobilization of the scapular and shoulder complex (gleno-humeral)
Publications and patents
2023
Garcia-Hernandez N., Buccelli S., Laffranchi M., De Michieli L.
Mixed Reality-based Exergames for Upper Limb Robotic Rehabilitation
ACM/IEEE International Conference on Human-Robot Interaction
2022
Buccelli S., Tessari F., Fanin F., De Guglielmo L., Capitta G., Piezzo C., Bruschi A., Van Son F., Scarpetta S., Succi A., et al.
A Gravity-Compensated Upper-Limb Exoskeleton for Functional Rehabilitation of the Shoulder Complex
Applied Sciences, vol. 12, (no. 7), pp. 3364
2022
Bodo G., Bello P.D., Tessari F., Buccelli S., Boccardo N., De Michieli L., Laffranchi M.
Comparative analysis of inverse kinematics methodologies to improve the controllability of rehabilitative robotic devices
IEEE International Conference on Rehabilitation Robotics, vol. 2022-July
Informations and details
For all the informations and details about FLOAT, click the button and send us an email:
Team Leader: Stefano Buccelli