The increasingly growing demand for flexibility in service applications and in the agile manufacturing sector has highlighted the need for intelligent systems, able to react and adapt autonomously to the external environment. To this end, in this line of research we focus on the development of novel context-aware and adaptive robotic behaviours able to distinguish expected interactions from external disturbances, to be able to react accordingly and appropriately.
Autonomous Robots
Autonomous impedance regulation
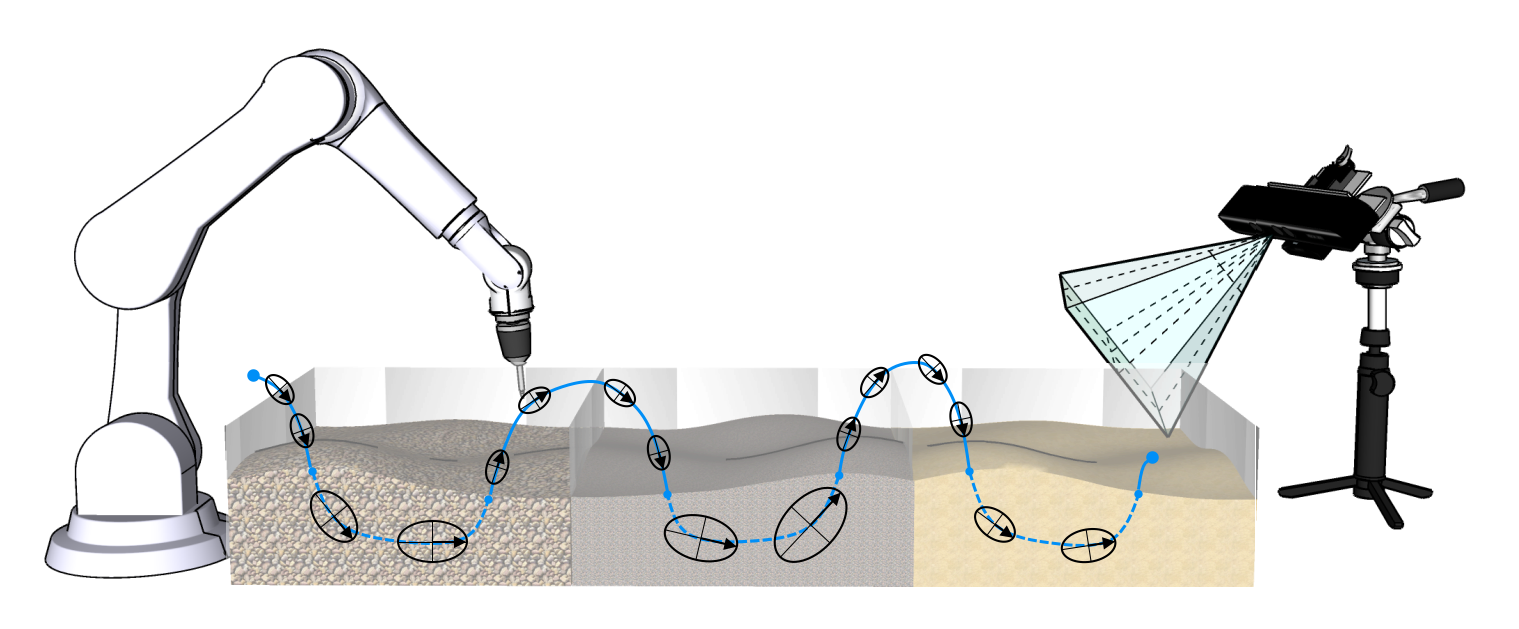 Complex interactions with unstructured environments require the application of appropriate restoring forces in response to the imposed displacements. Standard impedance control techniques provide effective solutions to achieve this, however, their quasi-static performance is highly dependent on the choice of parameters, i.e. stiffness and damping. To improve the generality of interaction planning through task-dependent regulation of the parameters, this line of research is focused on the development of novel self-regulating impedance controllers. The regulation of the parameters is achieved based on the robot’s local sensory data, and on an interaction expectancy value.
Complex interactions with unstructured environments require the application of appropriate restoring forces in response to the imposed displacements. Standard impedance control techniques provide effective solutions to achieve this, however, their quasi-static performance is highly dependent on the choice of parameters, i.e. stiffness and damping. To improve the generality of interaction planning through task-dependent regulation of the parameters, this line of research is focused on the development of novel self-regulating impedance controllers. The regulation of the parameters is achieved based on the robot’s local sensory data, and on an interaction expectancy value.
-
P. Balatti, D. Kanoulas, G.F. Rigano, L. Muratore, N.G. Tsagarakis, and A. Ajoudani, “A self-tuning impedance controller for autonomous robotic manipulation”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018. Paper - Video
-
P. Balatti, D. Kanoulas, N.G. Tsagarakis, and A. Ajoudani, “Towards robot interaction autonomy: Explore, identify, and interact”, International Conference on Robotics and Automation (ICRA), 2019. Paper - Video
-
P. Balatti, D. Kanoulas, N.G. Tsagarakis, and A. Ajoudani, "A method for autonomous robotic manipulation through exploratory interactions with uncertain environments” Autonomous Robots (AURO), 2020. Paper - Video
-
E. Mobedi, N. Villa, W. Kim, and A. Ajoudani. "An Adaptive Control Approach to Robotic Assembly with Uncertainties in Vision and Dynamics", IEEE 29th International Conference on Robot & Human Interactive Communication (RO-MAN), 2020. Paper
Adaptive planning strategies

The increasingly growing role of automation in logistics has highlighted the need for flexible solutions to be employed in industrial warehouses. To this end, we have developed adaptive planning strategies that, exploiting multi-purpose collaborative robots, can respond to this demand. This problem is tackled under different point of view, spanning from the autonomous repositioning of pallet jacks to the well-known problem of item-sorting and box-filling. With these works, we demonstrate how the same machine used for many other purposes, can be reused for standard tasks where usually ad-hoc machines are employed. This is an essential requirement especially for Small and Medium-sized Enterprises (SMEs), since they may not be able to afford multiple single-purpose, costly machines. On the other hand, they can exploit the flexibility of a multi-purpose machine, relieving the cost burden.
-
P. Balatti, F. Fusaro, N. Villa, E. Lamon, and A. Ajoudani, “A Collaborative Robotic Approach to Autonomous Pallet Jack Transportation and Positioning”, IEEE Access, 2020. Paper - Video
-
P. Balatti, M. Leonori, and A. Ajoudani, "A Flexible and Collaborative Approach to Robotic Box-Filling and Item Sorting”, Robotics and Autonomous Systems (RAS), 2021. Paper - Video
-
J. Liu, P. Balatti, K. Ellis, D. Hadjivelichkov, D. Stoyanov, A. Ajoudani, and D. Kanoulas, "Garbage Collection and Sorting with a Mobile Manipulator using Deep Learning and Whole-Body Control", IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids), 2021. Paper - Video
Augmented Hierarchical Quadratic Programming Control
Another line of research covers autonomous control techniques based on hierarchical programming. The aim is to best exploit the capabilities of complex robots, to achieve multiple tasks and objectives in dynamic environments. Using a hierarchical stack of tasks, it is possible to define the overall behaviour of the robot, ensuring that tasks that have lower priorities will not interfere with the more important ones. The overall control is therefore optimal with respect to the objectives defined and complies with all the constraints. This research line extends through the addition of the human figure in the control scheme on robot side. This allows to account for multiple human aspects, such as human fatigue and ergonomics, and thus to obtain an optimal overall solution.
-
F. Tassi, E. De Momi, and A. Ajoudani, "Augmented Hierarchical Quadratic Programming for Adaptive Compliance Robot Control”, IEEE International Conference on Robotics and Automation (ICRA), 2021. Paper