The Project
The acquisition of manipulation skills in robotics involves the combination of object recognition, action-perception coupling and physical interaction with the environment. Several learning strategies have been proposed to acquire such skills. As for humans and other animals, the robot learner needs to be exposed to varied situations. It needs to try and refine the skill many times, and/or needs to observe several attempts of successful movements by others to adapt and generalize the learned skill to new situations. Such skill is not acquired in a single training cycle, motivating the need to compare, share and re-use the experiments.
We propose Learn-Real: Learning physical manipulation skills with simulators using realistic variations.
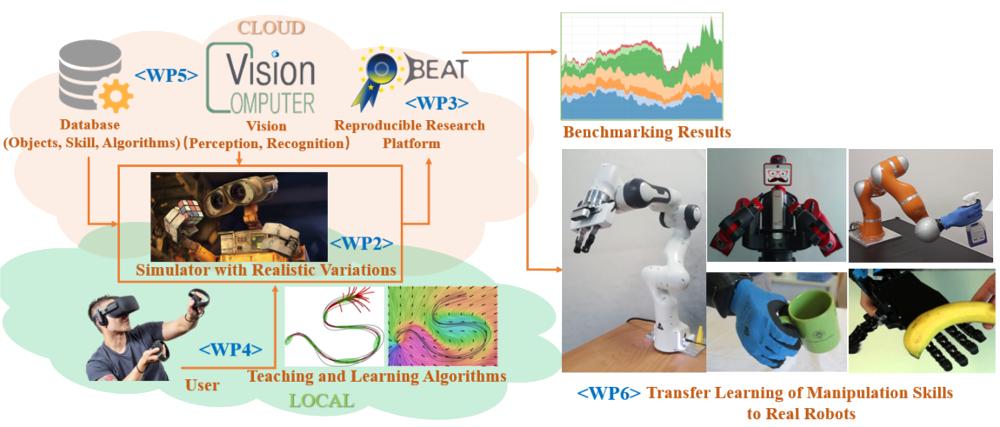
In LEARN-REAL, we aim to learn manipulation skills through simulation for object, environment and robot, with an innovative toolset comprising: 1) a simulator with realistic rendering of variations allowing the creation of datasets and the evaluation of algorithms in new situations; 2) a virtual-reality interface to interact with the robots within their virtual environments, to teach robots object manipulation skills in multiple configurations of the environment; and 3) a web-based infrastructure for principled, reproducible and transparent benchmarking of learning algorithms for object recognition and manipulation by robots.
Learn-Real project offcial website: https://learn-real.eu/